
Algorithm for a Quadcopter
Four Oregon Tech students received awards from the Institute of Electrical and Electronics Engineers (IEEE) international SusTech 2024 Student Poster Competition in April. The competition included an online presentation of student research around emerging technologies that drive sustainability.
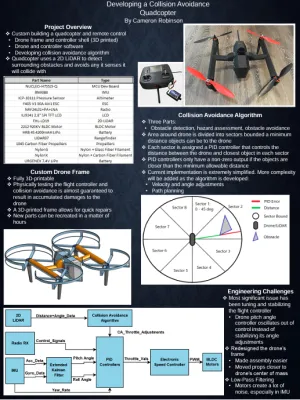
Oregon Tech Embedded Systems Engineering Technology and Applied Mathematics student Cameron Robinson won first place in the competition. His research titled, “Developing a 2D LiDAR Collision Avoidance Algorithm for a Quadcopter,” focused on an approach to develop collision avoidance algorithms for a quadcopter, which is similar to a standard drone, but has four blade rotors. Robinson’s research displayed how 3D printing can be utilized for the easy replacement of damaged parts from test flights.
“One major benefit of the entire [quadcopter] frame being 3D printed is that the frame can be easily repaired in the event that it breaks,” Robinson said in his project overview. “This is especially important in this project because, as mentioned, the drone is being used to test and develop a collision avoidance algorithm. In the case of a failed test, rather than needing to buy a new frame or drone, any broken parts can be recreated in two to four hours.”
Oregon Tech Computer Systems Engineering Technology Assistant Professor Ganghee Jang, Ph.D., served as Robinson’s faculty advisor for the research.
A poster by Oregon Tech students Owen Pyle (Embedded Systems Engineering Technology), Noah Marshall (Embedded Systems Engineering Technology), and Anesti Audeh (Electrical Engineering) placed third in the competition. The project titled, “HASEL and HALVE actuators for artificial limbs and physical therapy aids,” introduced using hydraulically amplified self-healing elastomers (HASEL) and hydraulically amplified low-voltage elastomers (HALVE) as haptic aids for artificial limbs. Elastomers are a rubbery material that can recover their original shape and the group project analyzed running high-voltage power through the elastomers to support artificial limbs.

and physical therapy aids
The research was co-advised by Computer Systems Engineering Technology Professor Stefan Andrei, Ph.D., and Natural Science Assistant Professor Rachel Edwards, Ph.D.
###


